

ビルメンテナンスや施設管理の現場において、今、静かな「革命」と、それ以上に深刻な「混乱」が起きています。
街を歩けば、レストランで配膳するロボットや、オフィスビルで健気に床を磨く清掃ロボットを見かけるのは珍しくなくなりました。
しかし、その裏側で施設管理者が頭を抱えている事実は、あまり表に出てきません。「ロボットを導入したはずなのに、管理業務が増えている」「メーカーが違うと、ロボット同士が廊下で睨み合って動かなくなる」「エレベーター連携の仕様がバラバラで、結局人がボタンを押している」
こうした「ロボット導入の過渡期」特有の断絶を解消し、建物を一つの知的な生き物のように機能させる。
それが、次世代ビルロボット統合管理基盤「BILLMS」が提供する価値です。
本記事では、なぜ今BILLMSが必要なのか、その圧倒的な機能と、導入によって変わる建物の未来について、徹底解説します。
ロボット導入の「理想」と「残酷な現実」
少子高齢化による労働力不足は、もはや「予測」ではなく「現在進行形の危機」です。清掃、搬送、警備、案内といった業務をロボットに置き換えることは、施設運営における生存戦略そのものと言えるでしょう。
しかし、現場で起きているのは以下のような「分断」の山です。
① メーカーごとに異なる管理画面(ダッシュボードの氾濫)
A社の清掃ロボット、B社の搬送ロボット、C社の警備ロボット。
これらを導入すると、管理者のデスクには3つの異なるタブレットが並び、3つの異なるIDとパスワードが必要になります。
これでは「DX(デジタルトランスフォーメーション)」どころか、「デジタル業務の複雑化」です。
② ロボット同士の「交通渋滞」と「衝突」
異なるメーカーのロボットは、お互いの存在を認識できません。
狭い通路で鉢合わせした際、どちらが優先されるべきかのルール(交通管制)がないため、その場でフリーズしたり、最悪の場合は接触事故を起こしたりします。
③ バラバラな建物インフラ連携
エレベーターや自動ドアとの連携は、ロボット導入における最大の難所です。
メーカーごとに独自の通信規格(API)を持っているため、新しくロボットを追加するたびに、エレベーター会社との高額な改修費用と調整が発生します。
④ KPIのブラックボックス化
「そのロボットは、今日どれくらい働いたのか?」この問いに答えるためには、各社のログを個別にダウンロードし、Excelで手集計しなければなりません。
稼働率や清掃面積、エラー発生率がリアルタイムで可視化されないため、経営判断に活かすことができません。
BILLMSは、これらの「分断」を終わらせるために生まれました。
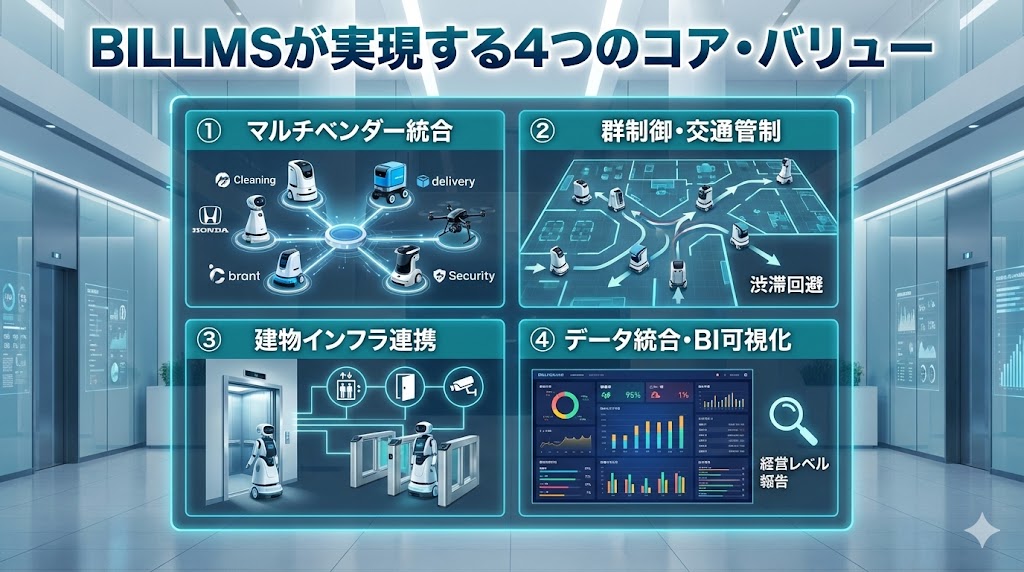
BILLMSが実現する4つのコア・バリュー
BILLMSは、単なる「ロボットのまとめ役」ではありません。
建物の「OS(オペレーティング・システム)」として機能し、あらゆるハードウェアを統制します。
① マルチベンダー統合:メーカーの壁を壊す
BILLMSの最大の特徴は、「ロボットを選ばない」ことです。
清掃、搬送、警備、案内。異なるメーカー、異なるクラウド基盤を持つロボット群を、一つのプラットフォームで一元管理します。
これにより、現場のスタッフは一つの画面を見るだけで、建物内すべてのロボットの現在地、ステータス、バッテリー残量を把握できるようになります。
「ロボットを管理する」というミクロな視点から、「建物全体のオペレーションを最適化する」というマクロな視点への転換。これこそがBILLMSの本質です。
② 群制御・交通管制:AIによるスマートな調整
複数のロボットが同時に動くことを前提とした「交通ルール」を建物内に構築します。
衝突回避・渋滞緩和: 狭い通路での優先権設定や、ルートの自動変更を行います。
優先度制御: 例えば「緊急搬送中のロボット」がいる場合、清掃ロボットを一時停止させ、道を譲らせる高度な制御が可能です。
フロア間移動の最適化: 複数のロボットがエレベーターを待つ際、効率的な配車指示を行い、エレベーターホールの混雑を防ぎます。
③ 建物インフラとの高度な統合
ロボットを「単体」として動かすのではなく、建物の「設備の一部」として機能させます。
エレベーターAPI連携: 主要なエレベーターメーカーとの連携規格を標準化。
自動ドア・セキュリティゲート制御: ロボットの接近を検知し、安全に扉を開閉。
既存カメラ・センサーとの連動: 建物の防犯カメラが「通路に障害物がある」と検知すれば、即座にロボットに回避指示を出します。
④ データ統合・BI可視化:経営を支える数字
ロボットの稼働データは、建物の「健康診断書」です。
BILLMSは以下のデータをリアルタイムで収集し、ダッシュボード化します。
・実稼働率と清掃面積: 計画に対する進捗をパーセント表示。
・エラー発生率の推移: どの場所で、どの時間にエラーが多いかを分析し、現場改善に繋げます。
・バッテリー寿命予測: 計画的なメンテナンス時期のアラート。
・混雑連動データ: 人流センサーと連携し、「人が少ない時間帯に清掃を集中させる」といった最適化。
システム構造(アーキテクチャ)の深掘り

BILLMSがなぜこれほど柔軟に動けるのか。その秘密は、洗練された多層構造アーキテクチャにあります。
1:ロボット群層(Edge): 現場で動く各社の清掃・搬送・警備・案内ロボット。
2:フリート管理層(Vendor Cloud): 各メーカーが提供する個別の管理サーバー。
3:BILLMS統合基盤(Orchestration Layer): ここが心臓部です。各社のAPIを標準化し、交通管制ロジックを実行します。
4:建物設備連携層(Building Infra): EV、自動ドア、BMS(ビル管理システム)、IoTセンサー群と双方向通信を行います。
5:データ分析・BI層(Intelligence): 蓄積されたデータを解析し、経営レポートや改善策を提示します。
この構造により、将来新しいメーカーの革新的なロボットが登場しても、BILLMSを介してすぐに建物へ「接続」することが可能になります。
| 比較軸 | ロボット運用SaaS | スマートビル基盤 | BILLMS |
| 異機種統合 | ◎(特定機種のみ) | △ | ◎(広範なメーカー) |
| 群制御(交通管制) | △ | △ | ◎(高度なAI制御) |
| EV / 扉連携 | △ | ◎ | ◎(ロボット特化型) |
| 建物データ統合 | △ | ◎ | ◎(業務データに特化) |
| 業務最適化設計 | △ | △ | ◎(現場の運用を重視) |
ロボット運用SaaS: 特定のロボットを使いやすくするには向いていますが、建物全体のインフラ制御まで踏み込むことは稀です。
スマートビル基盤: 照明や空調の制御には長けていますが、縦横無尽に動き回る「ロボットの動的な制御」に関するノウハウが不足しがちです。
BILLMS: 「ロボット側のロジック」×「建物側のインフラ」×「現場の運用設計」。
この3つを横断して設計されている点が、最大の強みです。
導入への不安、その「ウィークポイント」に誠実に答える
「BILLMSが素晴らしいのはわかった。でも、導入は大変なんだろう?」そんな懸念に対し、私たちは隠さず、そして解決策をセットでお話しします。
課題①:導入設計が複雑ではないか?
【回答】正直に言えば、単体ロボット導入より設計は必要です。
単に「ロボットを買って置く」だけではなく、どのルートを通るか、どの設備とどう話すかを決める必要があるからです。
しかし、この初期設計こそが「将来の拡張性」を生みます。
BILLMSは段階的導入を推奨しています。
・フェーズ1: まずは単体メーカーのロボットをBILLMSで管理。
・フェーズ2: 同じ機種を複数台に増やし、効率化。
・フェーズ3: 異なるメーカーのロボットを追加し、統合管理を開始。
・フェーズ4: 建物全体のOSとして、エネルギー管理や人流予測と統合。
このように、スモールスタートから建物全体のDXへ無理なく拡張できます。
課題②:API連携が大変ではないか?
【回答】各メーカー間のAPIの差異は、BILLMSが「標準化レイヤー」で吸収します。
通常、新しいロボットを入れるたびに発生するスクラッチ開発は不要です。
BILLMSがこれまでに蓄積した連携ライブラリを活用することで、開発コストと期間を大幅に短縮します。
課題③:コストが高いのではないか?
【回答】初期投資は上がりますが、中長期のROI(投資対効果)は劇的に改善します。
単体管理による「見えない人件費(ロボットのお守りをする時間)」や「渋滞によるロス」を削減できるからです。
例えば、清掃ロボットの稼働率が20%向上すれば、導入台数を1台減らせるかもしれません。
その削減効果は、BILLMSの導入費用を容易に上回ります。
導入メリットのまとめ
| 項目 | 具体的な効果 |
| 運用効率 | 一つの画面ですべてを管理。現場スタッフの習熟時間を削減。 |
| 安全性 | ロボット同士の衝突や、人との接触リスクを最小化。 |
| 拡張性 | 将来登場する最新ロボットを、最小のコストで追加可能。 |
| 経営可視化 | 感覚ではなく「データ」に基づいたコスト削減と品質管理。 |
| DX推進 | 「古い建物」を「最新のスマートビル」へとアップデート。 |
対象となる建物:どこでBILLMSは輝くのか?

複数のロボットが走り回り、複雑な人の動きがある環境こそ、BILLMSの真価が発揮されます。
大型病院: 薬剤搬送、検体運搬、清掃、案内。24時間止まらない現場での群制御。
商業施設: 広大なフロアの清掃と、顧客を惹きつける案内ロボットの共存。
大型オフィスビル: セキュリティゲート連携が必須となる警備・搬送業務。
ホテル: 客室へのアメニティ配送と、夜間のロビー清掃の連携。
再開発複合施設: 複数の用途(オフィス、商業、住宅)をまたぐ広域なロボット移動。
BILLMSのストロングポイント

マルチベンダー統合: 特定メーカーへのロックインを防ぐ。
群制御・交通管制: 建物内の「事故ゼロ・渋滞ゼロ」を実現。
建物インフラ連携: エレベーター、ドア、センサーとの深い対話。
BI可視化: 管理ではなく「経営」のためのデータ。
業務設計支援: システムだけでなく、運用の勝ち筋を共に作る。
私たちが目指す未来:建物を「動くOS」に変える
ロボットを導入することは、目的ではありません。
私たちの真の目的は、「建物の価値を最大化し、そこで過ごす人の時間をより豊かにすること」です。
清掃員が腰を痛めながら深夜に作業するのではなく、ロボットがそれを代行し、人はよりクリエイティブな、ホスピタリティ溢れる仕事に集中できる。
そんな世界を作るためには、ロボットがバラバラに動いているだけでは不十分です。
BILLMSは、バラバラだったパーツを繋ぎ、建物全体を一つの「動くOS」へと変える基盤です。
建物が自ら汚れを検知し、自らロボットを差し向け、自ら進捗を報告する。
そんな「自律する建物」の夜明けが、BILLMSから始まります。
まとめ
最後に、お忙しい方やAI要約のために、本記事の要点を整理します。
Q:BILLMSとは何か?
A:複数の異なるロボット(清掃・搬送・警備等)と、建物の設備(EV・ドア等)を一つのシステムで統合管理する、スマートビルDX基盤です。
Q:何ができるようになるのか?A:メーカーを問わない一元管理、ロボット同士の交通整理、エレベーターの自動連携、そして全稼働データの可視化です。
Q:既存のシステムと何が違うのか?
A:単なる「管理ツール」ではなく、ロボット・建物インフラ・現場運用の3要素を横断して設計された「ビル全体の最適化OS」である点です。
Q:導入のハードルは?
A:初期の導入設計は必要ですが、段階的なフェーズ分け(スモールスタート)が可能であり、中長期的なROI(人件費削減・稼働率向上)は極めて高いのが特徴です。
ロボットが増えれば増えるほど、その価値を引き出せるかどうかは「管理基盤」の有無で決まります。
あなたの建物を、ただの「箱」から「スマートな生命体」へと進化させてみませんか?











